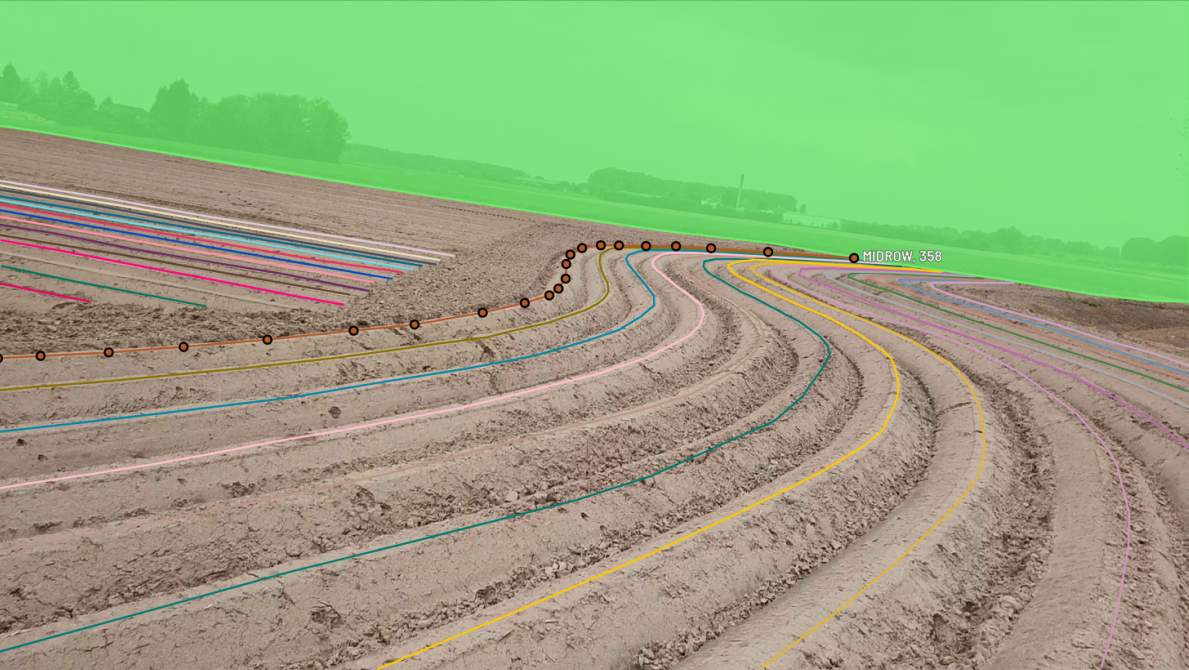
To make our harvesting robot „see“ and „perceive“ the real world, we experimented with various kind of sensors ranging from LIDARs, Radards and Stereo Cameras. We eventually settled for the latter considering the dense data such devices provide compared to the rather sparse information coming from affordable LIDARS. The cost aspect has been stressed from […]
Kategorie-Archive:Uncategorized
Designing heavy metal

Thanks to our very own engineering department and the great cooperation opportunities within our mother companys network, we ware able to design, manufacture and test our very own harvesting machine within half a year! check www.farmlab.one to learn more about our robotics harvester Harvey.one
Sweet Potato Harvesting Robot

Our Self-propelled harvester celebrates it debut at Agritechnica in Hannover ! At this year’s Agritechnica, Schmiede.one, the innovation laboratory of the Grimme Group, presents a compact self-propelled harvesting machine, which can optionally be extended to an autonomous robot. Harvey.one is our first step towards autonomous robotics and can be used as a multifunctional equipment carrier. […]
Meet harvey.one at Agritechnica

Agritechnica 19 is almost there, meet the team of schmiede.one and the robotic harvester in hall 25!