To make our harvesting robot „see“ and „perceive“ the real world, we experimented with various kind of sensors ranging from LIDARs, Radards and Stereo Cameras. We eventually settled for the latter considering the dense data such devices provide compared to the rather sparse information coming from affordable LIDARS. The cost aspect has been stressed from the beginning in our project, since the best technology will not help much on the market, if the price tag renders it too expensive for our target group.
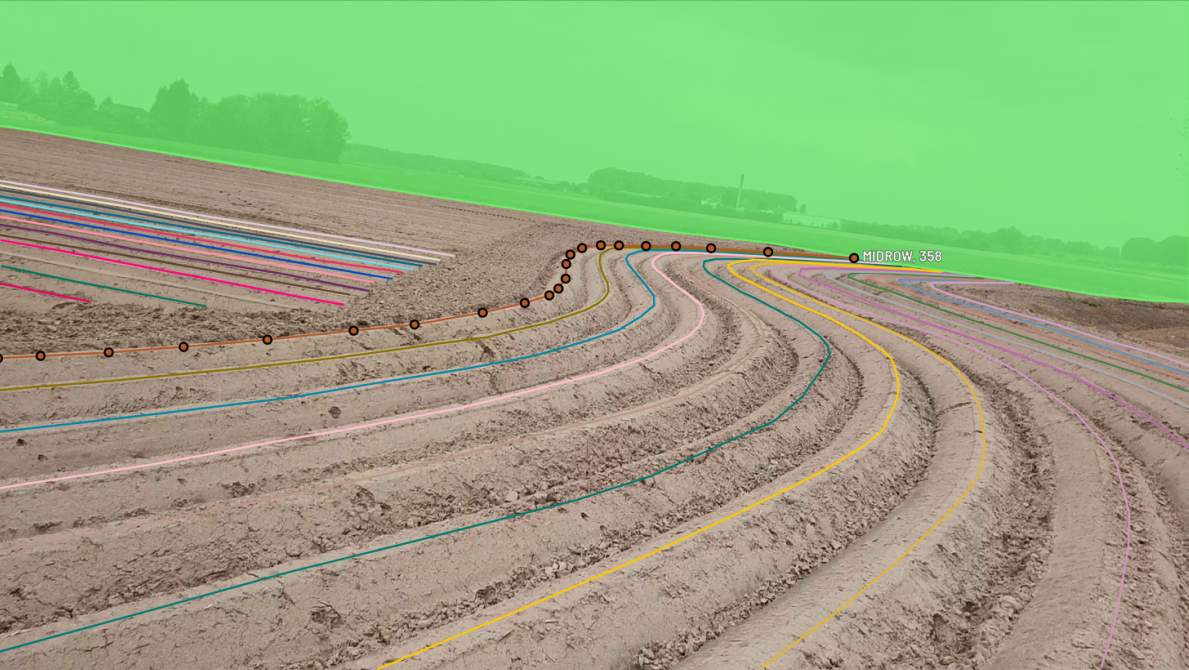
Moving on with the right choice of sensors, we annoted thousands of images on potato hills, during different seasons of the year and hooked this up to our semantic segmentation network.
Here we predict a path and feed the information to our path planner and control software.
Learn more about it on www.farmlab.one